A brief history…..
Divers have been the only way to do underwater work for many years
It was always a dangerous occupation, many sponge divers and pearl divers died bringing back the treasures of the deep – in those days ‘deep’ was a few hundred feet at the most.
With the invention of Cousteau’s aqualung, diving became popular as a sporting activity.
Many things were learned the hard way, decompression, nitrogen narcosis, the bends were all part of the risk.
As the need for underwater work and exploration increased into deeper waters, divers donned metal suits and tried new types of ‘air’, basically gas mixes that were safe to breathe at the higher pressures needed for deep diving.
Eventually, it became clear that there had to be a move towards underwater vehicles, at first manned but soon to become unmanned…. Remotely Operated Vehicles or ROVs.
These ‘work class’ ROVs were complex, expensive to buy and operate, but essential to industry and especially offshore exploration for hydrocarbons and other valuable minerals.
Designed for deep-water and heavy weight tasks they were generally launched off a Dive Support Vessel (DSV), and because of their cost, were only used where absolutely necessary, leaving shallow water work to the divers.
But shallow water is still dangerous – swell, current, rapid changes in pressure all added to the risk and there were still many lives lost. Technology moved on and much smaller ROVs were developed that could carry cameras and work at shallow depths, light enough to be hand launched and useful for observation in calm and clear waters.. but if any work needed to be done the divers were called in.
So, over many years innovations had disrupted the way we did things underwater and the innovations and disruptions continue as we now look at a further ‘diverless’ evolution – the Integrity Class ROV and the world of ODIN®.
In 2016 EM&I starts to develop diverless methods – not by using ROVs but instead by doing work that normally needed divers or a work class ROVs, with methods that didn’t even involve getting wet!
ODIN – the Norse god of wisdom and learning?
Danny Constantinis (Executive Chairman) of the EM&I Group – the international asset integrity specialists – tells the story: ”When operators started asking if it was possible to carry out the class requirement for Underwater Inspections in Lieu of Drydocking (UWILDs) without divers; I asked them why this was important and a senior manager famously said: “we spend millions of dollars and all we see are bubbles and weeds”, sothe idea of an alternative method for UWILDs was born.’
EM&I studied the class requirements and realised that the inspections were complex and vital to the safety of the vessel, especially Floating Production units such as Floating Production, Storage and Offloading vessels (FPSOs) that could not easily go to drydock. Isolation valves that controlled vital water flows in and out of the vessel, had to be reliable. Crucial structural elements such as bilge keels, critical welds, mooring systems and, in the case of disconnectable units, steering and propulsion equipment also had to be regularly checked.
It became clear that the task at hand needed several tools in the toolbox; devices that could inspect (and maintain) critical valves as well as a highly capable ROV which could clean, inspect, and help maintain the underwater hull and moorings.
ODIN was conceived and developed…. first a ‘cold tap’ device that allowed cameras and tools to be inserted from the ‘dry’ space into piping adjacent to isolation valves, sea chests and through hull plating so that critical components could be inspected and maintained, without taking the systems off-line and without putting people at risk.
These tasks were traditionally the realm of divers and observation class ROVs, but they were unable to carry out a proper detailed inspection, safely.
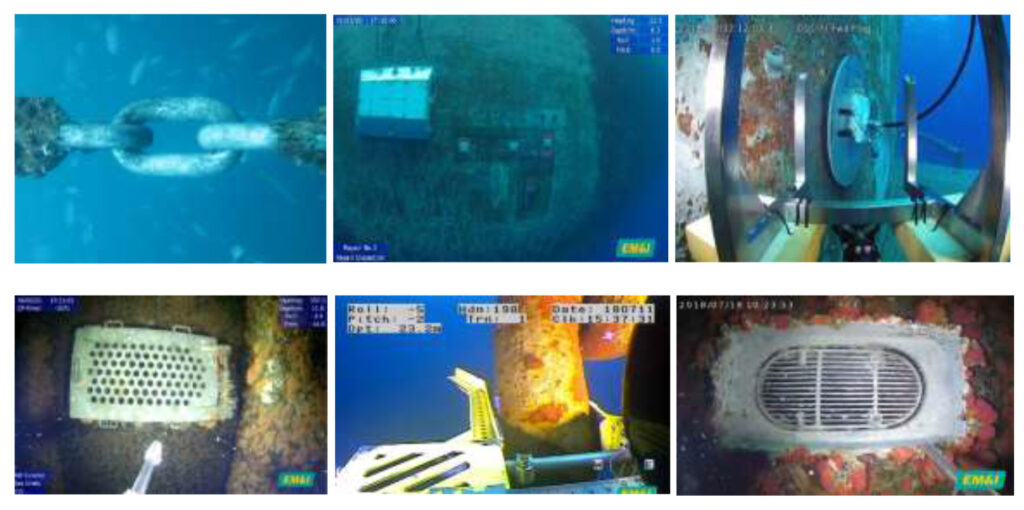
ODIN proved to be highly successful and soon many hundreds of ODIN access ports were installed creating a track record over the last 5-years carrying out inspection and replacing valves, replacing side shell plating and cleaning mooring chains and piping and sea chest inlet grids blocked with marine growth (refer Figure 1 below).
However, ODIN access ports could not solve all of the challenges and so the task of evolving high performance Integrity Class ROVs began. The specification started with cleaning sea chests, measuring anchor chain links and angles, and taking thickness measurements and cathodic protection readings.
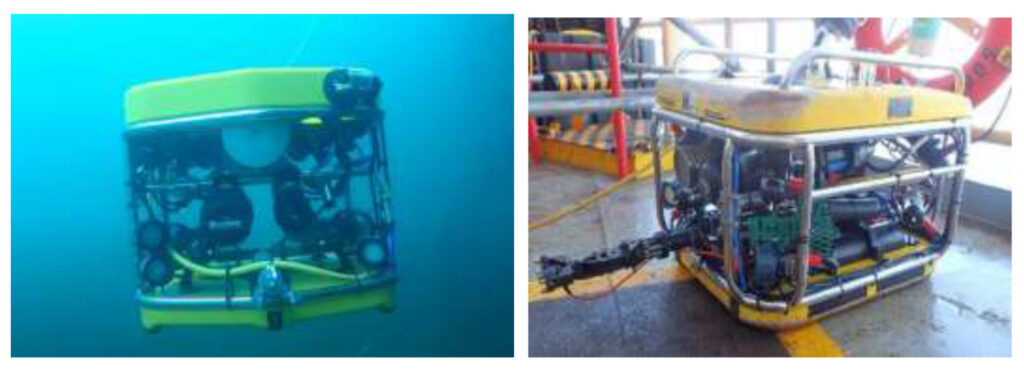
These ROVs had to be light enough to launch from an FPSO deck yet powerful enough to deal with big swells and high currents while remaining stable enough to operate measurement callipers and use cavitation cleaners…a real challenge but one which was met (refer Figure 2 below).
Are Integrity Class ROVs (ICRs) equivalent to divers and work class ROVs?
Divers and work class ROVs have special capabilities that are still required in our industry but the drivers for change are relentless.
Why? Because our industry and society demand that we minimise risk to human lives and that we continue to produce vital energy from the sea at reduced cost, as we transition from fossil fuels to renewable floating wind.
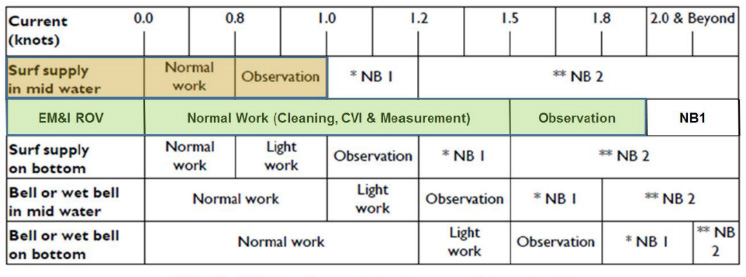
Diving spreads can need ten or more people to operate safely, and even then, are restricted by sea and weather conditions. Integrity Class ROVs need a team of three and can already operate in sea and weather conditions nearly double the safe limits for divers. (Refer Table 1).
Integrity Class ROVs carry cameras, NDT (Non-Destructive Test) equipment and tools. They can be launched and retrieved from the deck of an FPSO or a support vessel using lightweight Launch and Recovery Systems (LARS).

These systems enable the ROV to get past the dangerous ‘splash zone’ before being launched in calmer waters at the correct depth.
Ongoing developments mean greater power and more efficiency
ICRs can also cope with the power required to operate a wide range of tools with power provided by specialised tether systems. They can be provided with stabilised power units with back up UPS (Uninterruptible Power Supply) and do not depend on the reliability and stability of mother vessel power supplies.
Standard tethers are 200 metres long, which is usually sufficient for most FPSO UWILDs and mooring chain inspections, etc., but 400 metres tethers can also be provided if required.
Long line tethers up to 1,000 metres are also available using high voltage and transformers to accommodate voltage drops over long distances and thus deliver adequate power at the ROV.
ICRs can be equipped with vectored thrusters which enable an additional capability to rotate on the roll and pitch axes and hold position. This enables tasks needing an awkward orientation such as mooring chain angle measurements and efficient cleaning of sea chest inlet grids or bilge keel ends.
Cleaning sea chest inlet grids and mooring chains is time consuming and to do so efficiently and without damaging coatings needs specialised tools, so EM&I has tested, proved, and introduced cavitation cleaning.
Working limited to daylight hours and good visibility can reduce productivity…
Working limited to daylight hours and good visibility can reduce productivity so EM&I’s integrity class ROVs are equipped with a new sonar system to enable work to continue in poor visibility. This is particularly important for floating assets such as Floating Storage and Regasification Units (FSRUs) which are often moored in river estuaries with strong currents and poor water clarity.
‘IGLOO’ habitats for all the associated topside control equipment can also help to reduce humidity and protect equipment, increasing reliability and productivity. An independent stabilised UPS also reduces site dependency and increases reliability. It also ensures that if the primary power system fails for any reason the ROV can safely return to a safe location.
Skid mounted Deep Water Deployment (DWD) ROVs can be used for depth ranges in excess of 2,000 metres…
Skid mounted ‘DWDs’ (Deep Water Deployment) ROVs can be used for depth ranges up to 3,000 metres for inspecting mooring chains and risers which, at that depth, will not require much if any, cleaning (refer Figure 5).

Figure 5 – Deep Water Deployment ROV
The skid mounted DWD ROVs have a launch garage and a tether management system (TMS) and integral pressurised control cabin which increases their capability for deep water operations at a much lower cost than work class units. They are generally designed for operation from a support vessel, so can be used for mooring chain, riser and pipeline inspections at a distance from the FPSO.
The scope of diverless repairs on FPSOs is rapidly increasing…
The scope of diverless repairs on FPSOs is rapidly increasing, with sea valve isolation, repair or replacement, side shell and caisson repairs, sea chest cleaning, etc., with much more to come as both diverless and robotic technologies develop.
Underwater services have become a key part of the asset integrity industry which is why EM&I pioneered the use of integrity class ROVs for UWILDS and developed cleaning and measuring tools for the hull and moorings over the last 8 years since our first pilot project in Brazil in 2013.
“There’s a lot of technology evolving in working underwater safely and efficiently”, according to Danny Constantinis. “Increasing capability of smaller, more capable and lower cost ROVs is helping achieve the key targets of increasing safety and reducing cost with the added benefit of fewer POB, lower carbon footprint and applications to renewable energy such as Floating Wind.” he concluded.